News
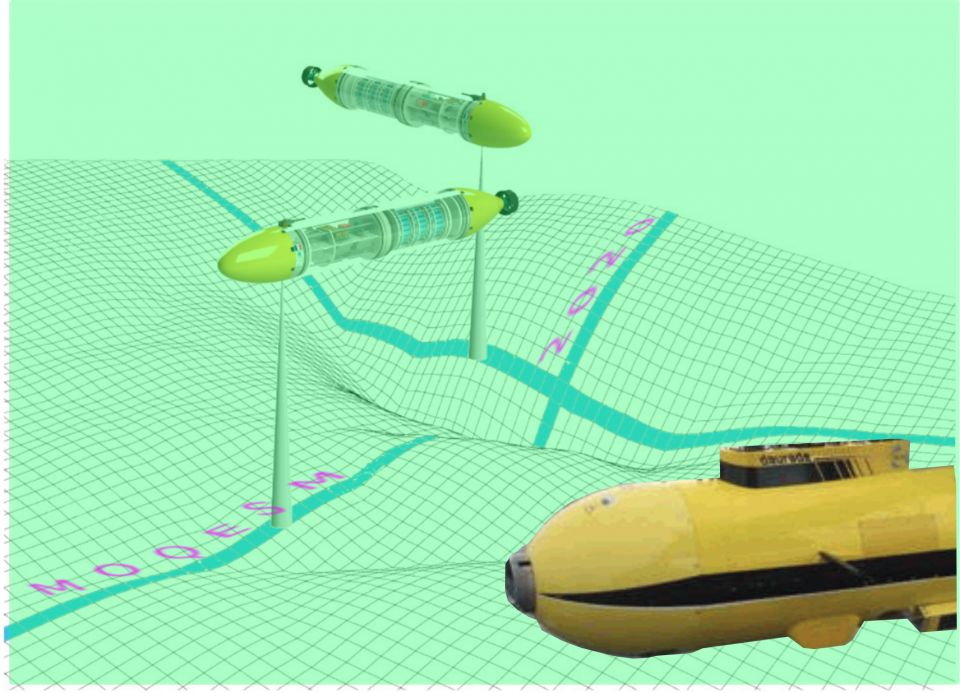
Focus on the session "MOQESM'2020: Robotics for marine observation"
Keywords: marine and underwater robotics, underwater and coastal mapping, perception and localisation, underwater intervention and manipulation, monitoring, security and safety
Session organised by: ENSTA Bretagne and Lab-STICC
In partnership with: LIRMM Montpellier and GDR Robotique
Mobile robotics has developed in structured and already mapped environments. In unknown and unstructured environments, deep caves, seabed, robotics ... it becomes essential where humans can hardly intervene in safely, where the operator can't help robots by tele-operation. Autonomous and intelligent, the robot must explore and mapping its environment, take decisions, locate itself and be able to come back. Technological progress allows the development of innovative approaches to solve essential problems of perception of the environment and safe navigation while ensuring compliance with certain constraints (complete coverage of an area, avoidance of obstacles...).
Contact:
Annick Billon-Coat and Luc Jaulin, ENSTA Bretagne
annick.billon-coat@ensta-bretagne.fr and luc.jaulin@ensta-bretagne.fr
- Know more