News
India experts take part of Sea Tech Week® 2020
- France and India, and particularly Brest and Goa are closely linked in the field of marine science and technology, supported at the highest level. Since 2017, the Campus community and the Indian Institute of Technology of Goa have developed relationships that are refined and more and more assertive.
Within this context, Sea Tech Week® is glad to welcome Professor B.K. Mishra, as member of its international committee.
Professor B. K. Mishra is the Director of Indian Institute of Technology Goa since March 2017. Prior to joining IIT Goa, he was a Professor at IIT Kanpur. Prof. Mishra graduated with a Bachelors degree in Metallurgical Engineering from N.I.T. Rourkela, in 1981 and then obtained his Ph.D. degree from University of Utah, in the year 1990. In the year 1993, he returned to India and joined IIT Kanpur. He became a Professor and subsequently in 2006 he went to CSIR on deputation from IIT Kanpur as Director of CSIR-IMMT which is a National Laboratory located at Bhubaneswar.
He is recognized for his contribution in the field of Extractive Metallurgy, Powder Technology, and Mathematical Modelling. He is a recipient of the National Geoscience Award and is a fellow of the Indian National Academy of Engineering.
Moreover, three indian experts will do an oral presentation during the e-conference:Estimating location specific water column properties from remote sensing signals via machine learning
included in the session: Big Data, Deep Learning, Satellite Observation / Monday 12 October - 13:30-15:30 (Paris Time)
presented by Clint Pazhayidam George, Indian Institute of Technology Goa, Farmagudi, Goa, India, India
Additional authors:
- Abhilasha Gupta, Indian Institute of Technology GoaFarmagudi, India
- Guillaume Sicot, ENSTA Bretagne, Lab-STICC, Brest, France
Keywords: Remote sensing, Data science, big data, data management
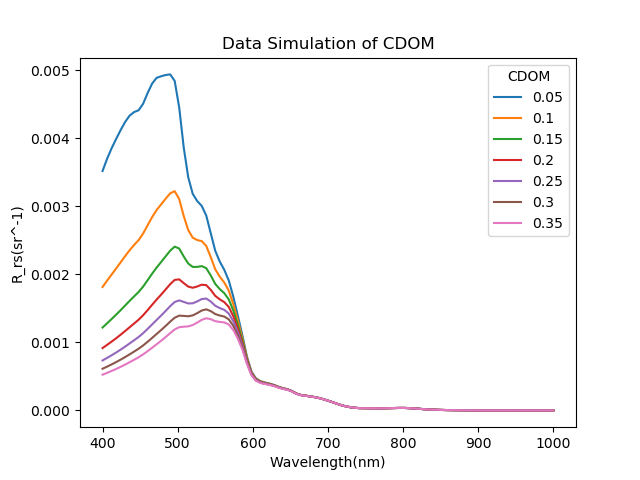
Inherent Optical Properties (IOPs) such as spectral absorption and scattering (insensitive to changes in the light field) and dissolved and particulate constituents of the water column indicate its quality, biological, and biogeochemical processes. Monitoring them helps us manage inland and ocean water resources and interpret climate change effects to some extent. Measuring in situ IOPs is challenging compared to Apparent Optical Properties (AOPs) such as radiometric variables, e.g., remotely-sensed upwelling and downwelling irradiances—they depend on the medium and the geometry of the radiance distribution. Remote sensing (RS) is a viable solution for water monitoring as its wide coverage in the spatial areas at frequent intervals. Traditionally, we infer IOPs and water constituents such as suspended matter, Colored Dissolved Organic Matter, and phytoplankton by solving an appropriate forward (analytical) model that explicitly relates bio-optical relationships to radiative-transfer processes (AOPs). They can be computationally intensive, conceptually complex, and require domain expertise. People thus employed statistical or machine learning (ML) methods such as regression, neural networks, and genetic programming to this problem. Without assuming a predefined model, they directly relate the parameters of interest to RS signals by training with known samples. We study the performance of (generic) data-driven ML methods, e.g., deep learning, trained on the ground truth data from a specific region, in comparison with the traditional approaches.
Abstract (extn): bit.ly/2BKko58
Intelligent Navigation and Adaptive Controller for AUV– A Hybrid Approach with KF-CS and Deep Learning in NARMAX Model
included in the session: Instrumentation, application to ocean observation / Wednesday 14 October - 09:00-11:00 (Paris Time)
presented by: Neelakandan Rajamohan, Indian Institute of Technology, Goa, India
Additional authors:
- Bidyadhar Subudhi, Indian Institute of Technology, Goa, India
- B N Rath, National Institute of Technology, Rourkela, Rourkela, India
Keywords: Perception and localisation, Marine and underwater robotics, Underwater intervention and manipulation
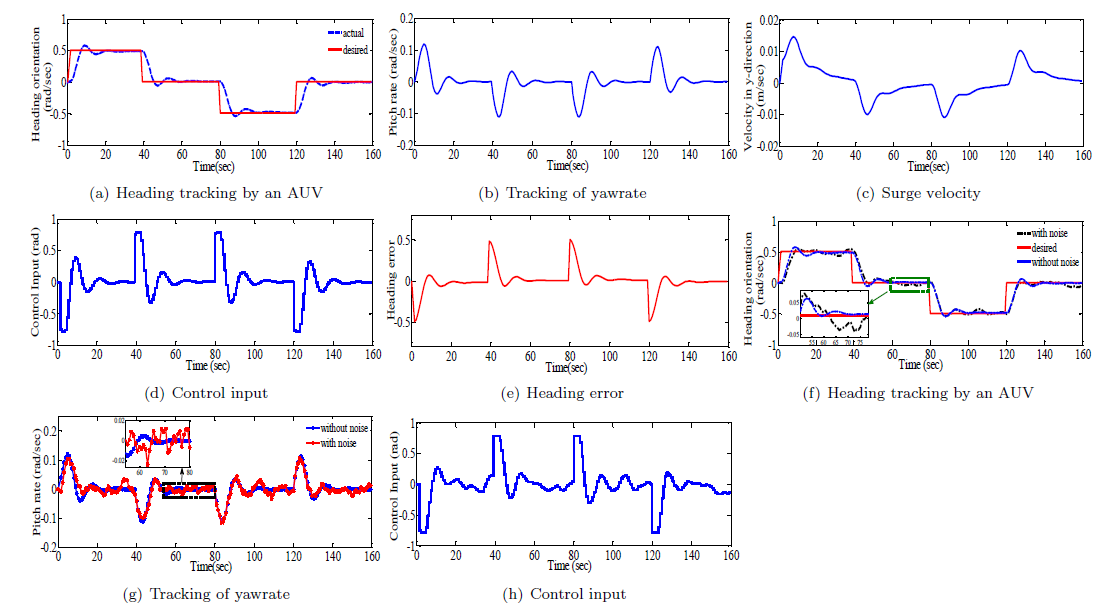
Autonomous underwater vehicle (AUV) navigation and localization in underwater environments is particularly challenging due to the rapid attenuation of Global Positioning System (GPS) and radio-frequency signals. Underwater communications are low bandwidth and unreliable, and further there is no access to a global positioning system. In order to address these challenges in AUV intelligence navigation, we propose compressed sensing based Kalman filtering (KF-CS) techniques in AUV positioning and navigation. Alongside, the deep learning (DL) has been applied to a large variety of problems in telecommunications, and the success in other domains motivates the application of DL to AUV navigation systems. Further, in this work, a constrained adaptive nonlinear model predictive control (ANMPC) is proposed for an underactuated Autonomous Underwater vehicle (AUV) without depending on the steady state knowledge of AUV. A Nonlinear Autoregressive Moving Average Exogenous (NARMAX) model is used to identify the dynamics. An optimized NARMAX model, achieved by using a Forward-Regression Orthogonal Least Square (FROLS) estimator and Error Reduction Ratio (ERR) criteria, is used to identify the heading dynamics of AUV. The key contributions are:
- SLAM technology with the application of Kalman filtered compressed sensing framework
- Intelligent navigation using deep learning incorporated with NARMAX model
- FROLS assisted with Kalman Filtered Compressed sensing to achieve the NARMAX for the adaptive controller design
Undersea Ocean Surveillance using Submarine Cables
included in the session: Platform, Data Management / Thursday 15 October - 13:30-15:30 (Paris Time)
presented by: Nitin Agarwala, National Maritime Foundation, New Delhi, India
Keywords: Underwater and coastal mapping, Remote sensing, Monitoring, security and safety
Undersea Ocean Surveillance was an advent of Cold War, WW-II and underwater acoustics. However, what began as a military requirement, gained scientific importance soon to support civilian scientific research (such as tracking whales and monitoring undersea volcanic activity).
Accordingly, various passive and active systems have been developed over the years to provide continuous acoustic coverage of the vast ocean area. One system not much spoken of, but has the potential of being used for a similar activity is the ‘submarine telecommunication cable’. These cables, a must for any country today, are laid across the oceans, providing volumes of data, and form the backbone of the telecommunication network for the globe. Studies have shown that by suitably modifying the repeaters, these cables can be used for ocean surveillance along with their primary purpose of telecommunication.
The paper discusses this much hidden ability of the submarine telecommunication cables to be used for undersea ocean surveillance. Though legal issues exist, for use in the deep oceans, these cables can be used for securing a countries own EEZ without any existing legal barriers by creating their own ‘Undersea Ocean Surveillance Wall’.